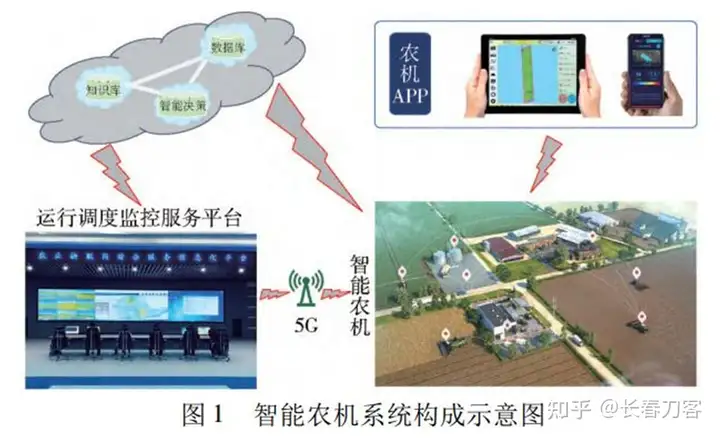
智能农机装备是集复杂农业机械、智能感知/智能决策/智能控制、大数据/云平台/物联网等技术为一体的现代农业装备,可自主、高效、安全、可靠地完成农业作业任务。
智能农机系统以智能农机装备为核心,包括田间信息感知获取、田间智能作业机械、田间互通互联以及云-端互联系统、云平台决策管控中心。
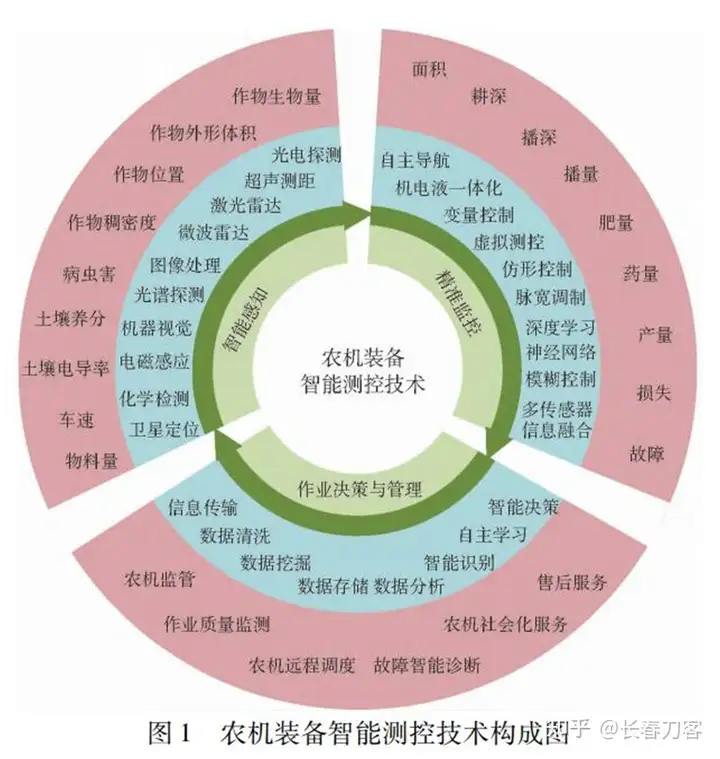
农机装备智能测控技术是智能农机(无人农场)的核心。
一、智能感知技术
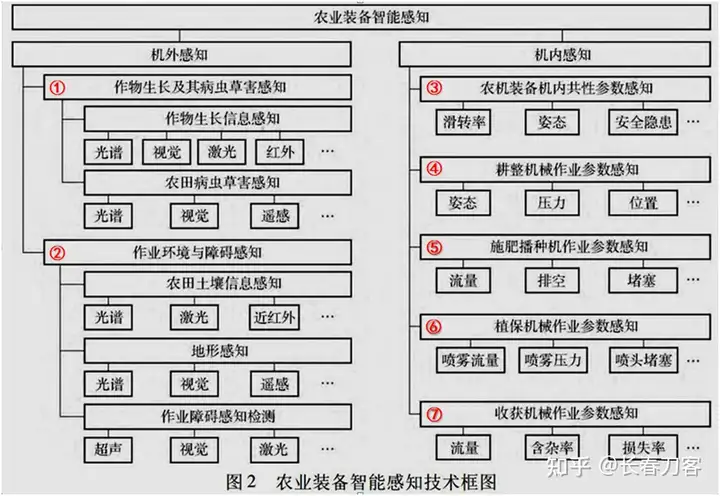
1-1 作物生长与病虫草害感知技术
(1)作物生长信息感知技术
叶绿素、氮素含量是作物生长的重要营养指标,基于光谱特征分析法实时获取作物叶绿素和氮素含量是变量施肥和精准植保作业亟待解决的难题。
在叶绿素含量检测研究方面:俄克拉荷马州立大学使用多光谱成像传感器检测叶绿素含量和浓度,使用超声波传感器估算植被高度来提高叶绿素含量检测精度;爱达荷大学使用平板彩色扫描仪检测植物叶片叶绿素含量;德国慕尼黑工业大学将光谱技术和数字图像处理技术结合用于叶绿素含量检测。
l 李民赞团队(中国农业大学)研究了基于近红外光谱技术的叶绿素含量检测方法。
l 朱艳团队(南京农业大学)基于高光谱遥感特征进行小麦叶片含氮量检测、小麦氮素积累动态检测等技术研究。
检测传感器及仪器产品开发方面,国内外已有较为成熟的叶绿素含量及氮含量检测仪器,技术已相对成熟。
便携式手持产品可实现参数的离线检测,离线手持式测量仪器已实现产品化。
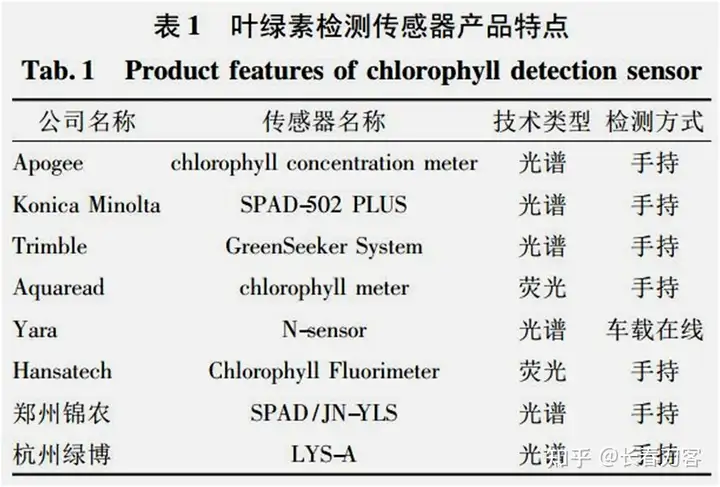

Yara公司(雅苒国际)的N-sensor传感器可直接安装在车载机具上进行作物叶绿素含量以及氮素含量的在线检测,精度还有待进一步提高。
车载叶绿素和氮素含量高精度实时在线快速检测是变量施肥和精准植保作业的关键,是亟待解决的难题。
(2)农田病虫草害信息感知技术
目前病虫害的检测方法主要有荧光光谱法、可见/近红外光谱法、高光谱成像和数字图像处理法等。
国外学者的研究工作较早。如美国爱达荷州立大学,基于光谱特征,使用支持向量机(SVM,机器学习算法)来检测感染病毒的马铃薯植株; 德国波恩大学,基于荧光光谱特征,使用支持向量机来检测小麦叶锈病;比利时鲁汶大学,基于高光谱反射信息,使用荧光成像技术来检测冬小麦黄锈病。
l 何勇团队(浙江大学)利用可见光和近红外光等光谱信息对茄子叶片灰霉病、大豆豆荚炭疽病进行检测。
l 王儒敬团队(中国科学院)研究了基于深度学习的病虫害智能化识别系统,使用多分类器融合的方法对玉米叶部病害进行识别。
目前杂草的检测识别定位主要有视觉法和光谱法。
澳大利亚昆士兰科技大学、日本名古屋大学、丹麦奥尔堡大学、法国勃艮第大学、比利时让布卢大学等使用单目相机、立体视觉传感器等进行杂草检测。
l 李伟团队(中国农业大学)研究了基于视觉形态特征的杂草识别方法,将其应用到移栽类蔬菜用苗间锄草机器人上。
l 何东健(西北农林科技大学)等和李先锋(江苏大学)等分别将支持向量机和DS证据理论(人工智能)用于多特征融合的杂草识别方法。
国内外一些农机企业也推出了农田杂草识别系统,科乐收(CLAAS)、蓝河科技(Blue River Technology)分别使用了基于视觉的田间杂草感知系统(图4a)。碳蜂公司(Carbon Bee)推出了一种车载的高光谱传感器AQiT-Sensor,可以识别出作物中间生长的杂草(图4b)。

目前农田杂草的感知技术主要基于视觉特征,对于不同的杂草需要不同的算法,用于学习训练的数据库比较单一和独立。未来可以将杂草的特征进行整合建立一个统一的数据库,使用机器学习的方式将各种杂草最主要的特征进行提取,减少终端的运算量,提高杂草感知的准确性和实时性。
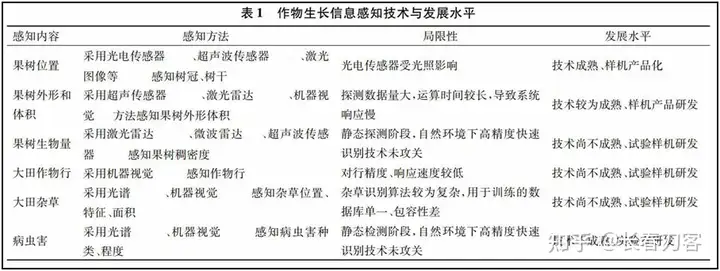
目前研究现状:
作物位置(成熟)、外形体积(成熟) ;
生物量(不成熟)、病虫草害信息(不成熟)。
1-2 作业环境与障碍感知技术
(1)农田土壤信息感知技术
土壤养分信息获取:
①测土配方:目前国际上应用最广。但是测土配方采样栅格区域较大,细化栅格进行土壤养分测定耗时耗力,需要长期积累。
②遥感探测技术:通过对土壤进行探测,经反演模型构建,分析有机质等土壤养分信息作为施肥处方变量依据,是一种大范围处方信息快速获取手段。但是存在动态数据监测困难的问题。
③土壤电导率:能够反映土壤养分差异,是施肥变量在线获取的重要手段,主要有电磁感应法、遥感法、化学检测法、“电流-电压”四端法,研究应用最多的是四端法,其检测装备可快速检测电导率并且受环境干扰较小。
车载土壤信息获取包括土壤养分、水分、酸碱度、压实度等信息。
车载土壤养分精确测量目前还没有成熟的手段,但国内外学者都对此进行了大量深入研究。
国外:美国乔治亚大学使用射频识别技术对土壤的温度信息进行快速无线实时监测; 意大利卡西诺大学使用主动红外热成像法实现了实验室和现场的土壤含水量快速检测; 比利时列日大学使用近红外反射光谱法检测土壤有机质含量。
l 何勇团队(浙江大学)利用土壤的光谱特征来检测土壤的有机质含量、含水率、氮磷含量、pH 值等信息;
l 李民赞团队(中国农业大学)基于卤钨灯光源和多路光纤法设计了土壤全氮含量检测仪,基于近红外光谱信息对土壤参数进行实时分析;
l 王儒敬团队(中国科学院)设计了土壤钾离子非接触电导检测装置,基于光谱、卷积神经网络等方法对土壤有机质含量进行预测;
l 张小超团队(中国农业机械化科学研究院)研究了基于激光诱导击穿光谱的土壤钾素检测方法,应用傅里叶变换近红外光谱技术分析了土样的全氮、全钾、有机质养分含量和pH 值;
l 孙宇瑞团队(中国农业大学)开发了土壤水分剖面实时测量传感器、农田土壤含水率与坚实度信息快速采集系统,运用近红外光谱分析方法对土壤质地进行分类。

奥地利 POTTINGER公司的车载综合土壤传感器TSM,可以实时地扫描土壤表层和深层土质结构,得到不同区块的压实度、含水率、电导率和土壤类型等信息。

美国精密种植公司(Precision Planting) Smart Firmer传感器和Delta Force压力传感器能够感知土壤的有机质含量,收集温度和湿度信息,采集土壤的硬度信息。
美国Veris公司的iScan车载传感器可以实时检测土壤的质地、含水率、温度、土壤阳离子交换容量、有机质含量等信息。
在土壤电导率方面:
l 李民赞团队(中国农业大学)研制出便携式土壤电导率检测装置。
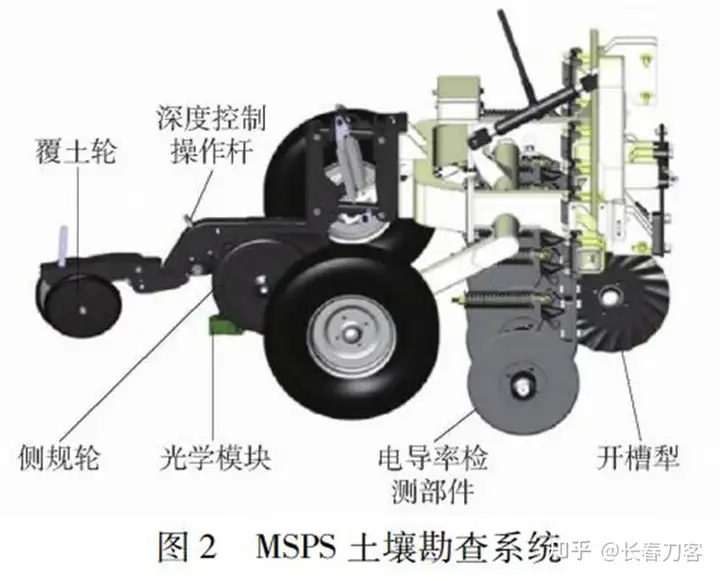
美国Veris公司研制的车载式MSPS土壤OM-EC-pH勘查测绘系统可以快速、高密度、原位测绘区域土壤电导等参数。
土壤电导率在线监测系统的精度和可靠性是困扰土壤电导率国产化产品应用的难题,研究土壤电导率与施肥处方决策模型将是下一步工作重点。
土壤养分车载精确测量是未来努力的方向,车载含水率、酸碱度、压实度、有机质含量等参数测量技术相对成熟,但高可靠性、高精度、多参数组合量传感器是未来的发展方向,在土壤中预埋大量物联网传感器的智慧农田系统是未来智慧农业的发展趋势。
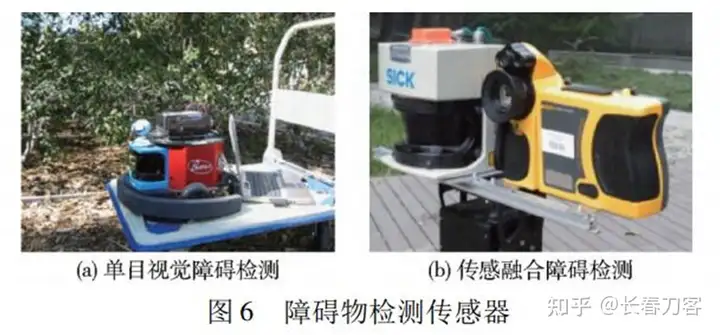
(2)作业障碍信息感知技术
目前障碍物检测手段主要有超声雷达、激光雷达、红外传感、视觉传感器以及多传感融合等。
l 美国肯塔基大学使用超声波传感器检测农业环境中的障碍物。
l 韩国外国语大学、西班牙阿卡拉德赫拿勒斯大学使用多个超声波传感器组成阵列来检测障碍物,该方法可以有效地提高稳定性。
l 德国汉诺威大学使用三维激光雷达检测障碍物,受天气、光照等环境因素的影响较小。
l 美国斯坦福大学使用单目视觉传感器检测障碍物,配合强化学习算法提高检测稳定性(图 6)。
l 德国凯泽斯劳滕大学使用双目立体视觉生成点云信息,识别障碍物比单目视觉更加准确。
l 刘成良团队(上海交通大学)研究了基于支持向量机的视觉水田田埂边界检测方法。
l 周俊团队(南京农业大学)基于机器视觉技术检测作业环境中的运动障碍,采用帧差法消除机器人自身运动的影响。
l 何东健团队(西北农林科技大学)基于机器视觉技术,使用贝叶斯决策图像分割法进行障碍物检测。
l 奥地博田公司的车载Sensosafe传感器通过光学红外传感器检测在收割时隐藏在草丛中的野生动物。
农业装备作业环境中的障碍物感知技术中,红外技术是检测人和动物的有效方法,超声与激光雷达测量范围大,对距离、速度检测精度高,三维雷达测量精度高,但成本也高,基于视觉、二维雷达组合的障碍物检测是较理想的方案,多传感融合是农田障碍感知的研究重点。
1-3 农业装备共性参数感知技术
农业装备机内共性参数包括发动机信息、动力输出信息、扭矩信息、滑转率、姿态信息、安全隐患信息等。其中发动机信息、动力输出信息等可通过CAN总线按照ISO 11783协议读出,姿态信息一般可采用北斗模块和陀螺仪获得,而扭矩信息、滑转率是农业装备共性参数检测的难点。
l 伊朗学者基于径向基函数 (RBF) 神经网络和自适应神经网络模糊推理系统(ANFIS) ,使用低成本传感器对拖拉机发动机的扭矩进行了估测。
l 王书茂团队(中国农业大学)使用多模多频卫星定位与惯导测速技术,采用扭振补偿的旋转编码测速方法,实现了低速扭振动力机械的驱动轮边速的高精度测量。
未来农业装备机内共性参数感知的研究重点是扭矩信息和车轮滑转率精确测量。
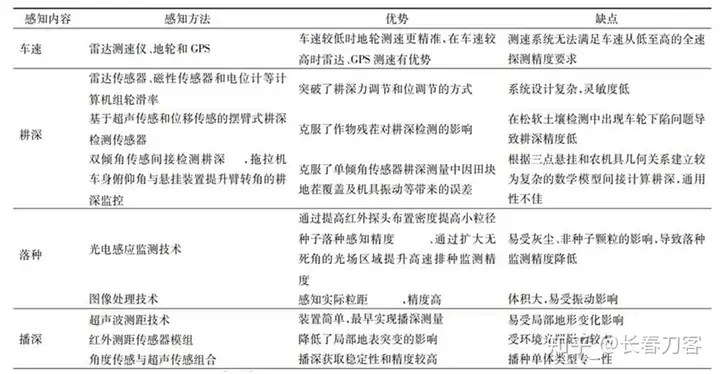
1-4 耕整机械作业参数感知技术
耕整机械的作业参数有姿态、压力、位置、深度等。
l 孟志军团队(北京农业智能装备技术研究中心)提出一种基于深松机组姿态估测的耕深检测方法。
l 朱忠祥团队(中国农业大学)提出一种基于倾角传感器的自动测量农机具耕深的方法。
l 苑严伟团队(中国农业机械化科学研究院)提出一种基于超声波测距传感器的悬挂式深松机耕深在线检测方法。
l 博世力士乐公司(中德)推出用于耕整机械的液压控制解决方案,方案使用多种传感器实现了耕整机具姿态感知、耕整作业阻力感知、耕整深度感知。
未来耕整机械的作业参数感知可以结合土壤信息感知技术,在耕整阶段全方位、多参数地感知土壤信息,建立土壤信息图,实现“一次感知,全过程使用”。
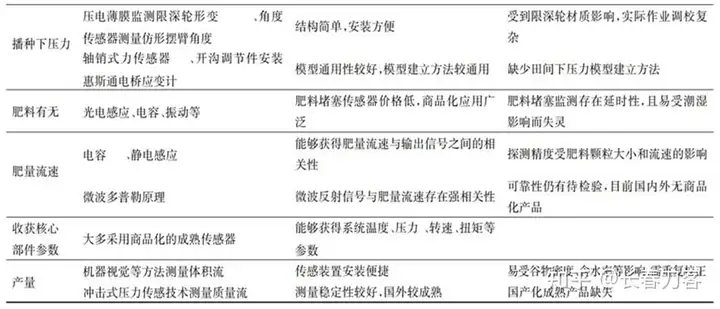
1-5 施肥播种机械作业参数感知技术
施肥播种机械的作业参数有种肥流速流量、播施深度等。
l 苑严伟团队(中国农业机械化科学研究院)设计了一种差分结构的电容传感器,在排料管道外壁构建阵列式电容传感器来提高检测精度。
l 刘成良团队(上海交通大学)基于电容法设计了一套用于小麦播种量检测的系统,建立了种子数量与电容变化量之间的线性关系。
l 余洪锋团队(南京农业大学)设计了一种基于皮带秤的施肥机施肥性能检测装置,装置可以检测排肥口的实时流量。
l 美国精密种植公司的SpeedTube是高速种植系统的一个组件,可以在高速播种的情况下精确测量播种施肥的速率。
目前施肥播种精量控制技术比较成熟,但在肥种流量检测方面,虽然有光电、电容等不同方法,但其精度不高、可靠性还有待进一步提高,应侧重于检测数据的智能处理方法以及创新感知原理新型传感器设计的研究。
1-6 植保机械作业参数感知技术
植保机械作业状态参数包括 喷雾压力、喷雾流量、喷杆姿态等。
l 李树江团队(沈阳工业大学)通过多传感信息采集,建立基于总线的作业速度、喷雾流量、喷雾压力、喷杆作业状态、喷头堵塞、喷杆高度探测、药液体积、气象环境等参数的在线监测系统,并实现喷头堵塞及低流量自动报警、喷杆高度自动仿形,解决了传统植保机械容易出现的农药漏喷、不均匀和飘移等问题。
l 美国精密种植公司开发了用于液体测量的传感器,该传感器可以实时测量包括液体农药和液体肥料在内的液体流量。
目前对于植保机械的作业参数感知研究较少,未来应研究液体肥料和农药的感知机理,解决传感器的抗腐蚀性和精度保持性问题。
1-7 收获机械作业参数感知技术
稻麦、玉米等联合收获机械的作业参数有含水率、流量、损失率、含杂率等。
l 巴西圣保罗大学使用 6 个双板差分冲击式传感器形成阵列来测量谷物产量,有效地减小了振动引起的噪声干扰。
l 印度旁遮普农业大学基于称量传感器开发了安装在储罐底部的收获机械产量传感器,结合GPS系统开发了产量制图系统。
l 丹麦电气工程技术大学使用谷物流量模型和谷物吞吐量传感器,对谷物流量进行预测。
l 印度农业工程学院使用人工神经网络技术评估田间条件下的谷物收获损失。
l 加拿大阿尔伯塔大学使用9个声学谷物撞击传感器布置在收割机分离格栅下方,通过对声学撞击信号的分析检测谷物损失量。
l 比利时鲁汶大学基于多光谱视觉传感器和遗传算法检测谷物流中的谷壳、稻草等杂质,得到谷物清洁度数据。
l 罗锡文团队(华南农业大学)设计了一种双板冲量式谷物流量传感器及其差分消振电路,以消除车身振动对测产精度的影响。
l 刘成良团队(上海交通大学)设计了冲量式谷物联合收获机智能测产系统和基于计算机视觉的谷物测产系统。
l 张小超团队(中国农业机械化科学研究院)研究了基于称重法的联合收获机测产方法,设计了用于联合收获机谷物损失测量的聚偏氟乙烯阵列传感器。
l 刘成良团队(上海交通大学)研究了基于光电原理的棉花流量产量测量装置,引入网络神经元进行数据的分析。
l 郑传涛团队(吉林大学)提出采用可调谐二极管激光吸收光谱技术,探测痕量CO,研制抗干扰新型红外CO传感器。
目前收获机械的作业参数传感原理已基本成熟,国外科乐收等机型也安装有成熟的水分、流量等传感器。
国内缺乏成熟的产品,主要在于检测精度与可靠性不高,虽然多年来国内学者一直进行此方面的研究,但在精度、可靠性、算法模型等方面与实际应用还有差距。